01_基本概念 🤖
深度强化学习的目标是学习以下两者之一:
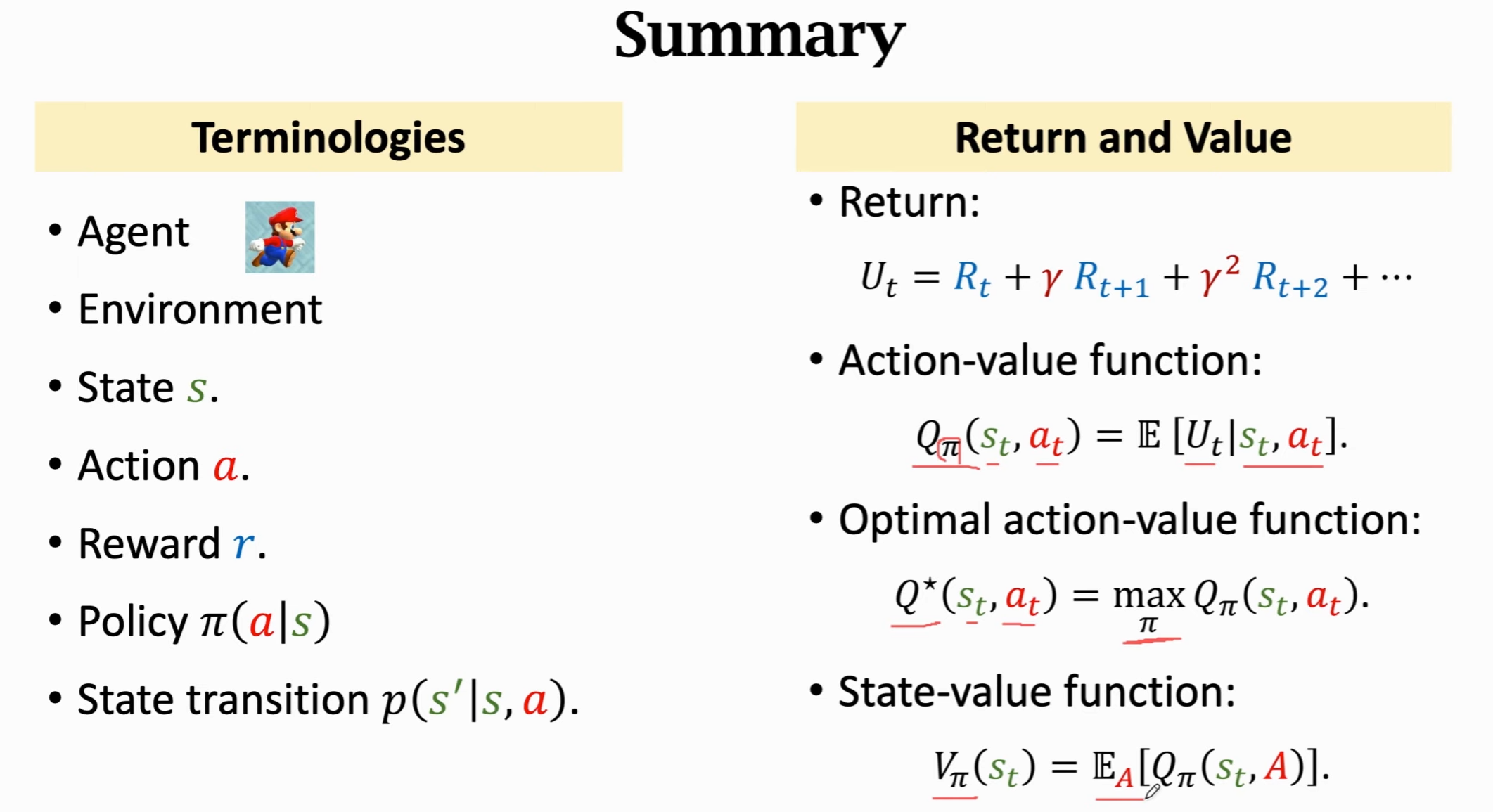
- 🎯 Policy 函数 π(a|s)
- 🏆 最优动作价值函数 Q*(s, a)
只要学到其中之一,就可以自动控制 Agent 玩游戏:
- 如果知道 Policy 函数 π(a|s),就能把状态 s 作为输入,算出每一个动作的概率,然后随机抽样得到动作 a。
- 如果知道 Q*(s, a),就能评估当前状态下每一个动作的好坏,从而选择 q 值最高的动作。
- 例如:如果“向上跳”的动作 q 值最高,Agent 就应该向上跳。
✅ 结论: The Agent can be controlled by either π(a|s) or Q*(s, a).
📊 Value Functions
1. Action-value function (Q 函数)
定义:
其中 U_t 是未来所有奖励的加权和。 特点:
- 🔗 与 policy π 有关
- 🗺️ 与 状态 s_t 有关
- 🎬 与 动作 a_t 有关
作用:
打分。⭐
2. State-value function (V 函数)
定义:
离散型:
连续型:
特点:
- 🔗 只和 policy π 与 状态 s 有关
- 与具体动作 a 无关
作用:
- 🧐 V_π(s) 可以评价当前状态的好坏(快赢了/快输了)
- 如果 policy π 固定, 那么 s 越好,V_π(s) 的值就越大.
- 📈 V_π(s) 还能评价 policy π 的好坏:
- 当状态确定, 若 π 越好,E_S[V_π(S)] 的平均值就越大.
- 🧐 V_π(s) 可以评价当前状态的好坏(快赢了/快输了)

⚙️ 强化学习方法
1. 价值学习 (Value-based learning)
- 🧠 使用 DQN 近似 Q*(s, a)
- 🔄 通过 Temporal Difference (TD) 学习网络参数
2. 策略学习 (Policy-based learning)
- 🧩 使用 Policy Network 近似 π(a|s)
- 📐 通过 Policy Gradient 学习网络参数(计算策略梯度并做梯度上升)
3. Actor-Critic 方法
- 🤝 结合 Policy Network + Value Network
🌟 Example
- AlphaGo ♟️
贡献者
 yuki
yuki